众所周知,在城市环境里,由于高楼大厦,会有多径效应的影响,以至于GPS测量出现较大的误差。在自动驾驶中,视觉定位、激光雷达定位以及GPS定位中,只有GPS是属于绝对定位的,其它定位方式都需要在结构化的环境下提取相应的环境特征,一旦到达特征比较稀疏的环境,很容易出现系统失效的问题,比如激光雷达定位,如果是在十字路口,可能环境特征比较少,就会定位出错。再比如如果自动驾驶车被周围的高大巴士挡住,那也容易出现问题。因此,可以预见,GPS是必不可少的,对应自动驾驶来说。如何从数据源去解决多径效应,也许也是值得研究的问题。最近,笔者阅读了一篇关于融合定位的文章,与大家一起分享。
目录
Abstract— This paper introduces a localization based on GPS and laser measurements for urban and non-urban outdoor environments. In this approach, the GPS pose is Kalman filtered using wheel odometry and inertial data and tightly integrated into a Monte Carlo Localization based on 3D laser range data and a line feature reference map. By applying to this kind of sensor fusion, global localization as well as precise position tracking in close distance to buildings is enabled where only poor GPS observations are available.Following the description of the localization system, real world experiments demonstrate the functionality of the presented approach.
摘要
本文介绍了一种基于GPS和激光测量的城市和非城市户外环境定位。在该方法中,使用车轮里程计和惯性数据对GPS姿态进行卡尔曼滤波,并且基于3D激光数据和线特征参考地图紧密地集成到蒙特卡洛定位中。通过应用这种传感器融合,可以实现全局定位以及在GPS信号差的建筑物附近的精确位置跟踪。
系统框架
卡尔曼滤波 + MCL

定位效果

蓝色线代表卡尔曼滤波之后的GPS定位信息,红色线为经过蒙特卡洛定位算法后的位置信息。
一些亮点
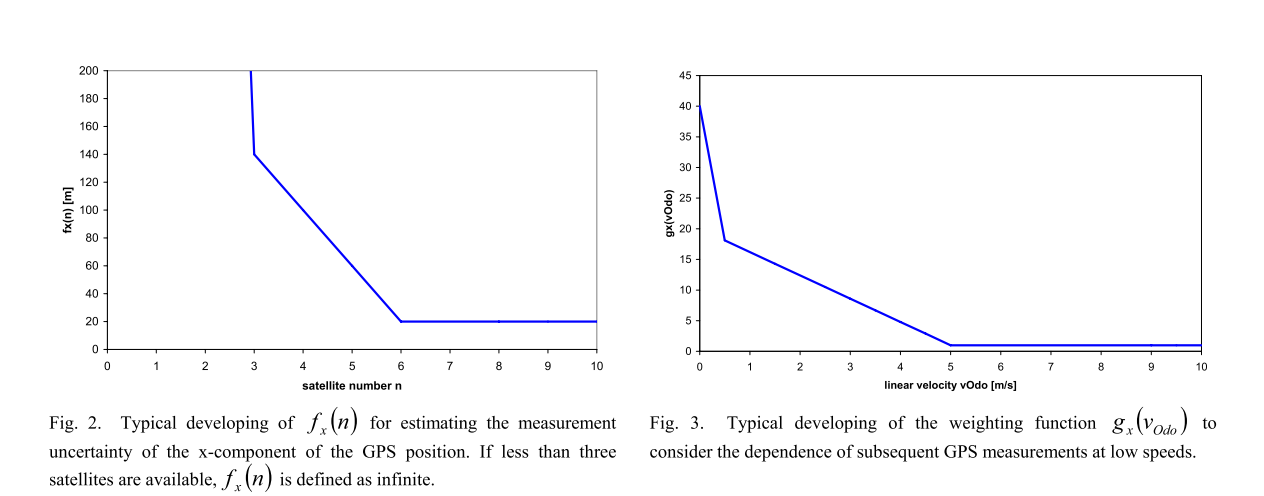
本文有意思的点是在利用GPS数据时,考虑了卫星数量和车的速度的因素。
对论文数学推导和具体细节感兴趣的朋友可以google论文标题:
A GPS and Laser-based Localization for Urban and Non-Urban Outdoor Environments。
或者通过百度网盘下载:
链接:https://pan.baidu.com/s/1UQt-lCUrNl5BAslMks1dUQ 提取码:m329
笔者目前主要从事自动驾驶研发工作,本公众号主要关注机器人和自动驾驶方向的技术以及最新进展,闲暇时也和大家聊聊读书、生活以及最新的电子科技产品,希望大家喜欢,共同进步!


